This depends on your specific application. Raspberry Pi is a general-purpose computer and is great for running programs and applications. Arduino is a microcontroller and is great at performing specific tasks such as controlling motors, lights, and sensors. If you need to run a program or application, Raspberry Pi is likely the better choice. If you need to control motors, lights, or sensors, Arduino is likely the better choice.
When to use an arduino ?
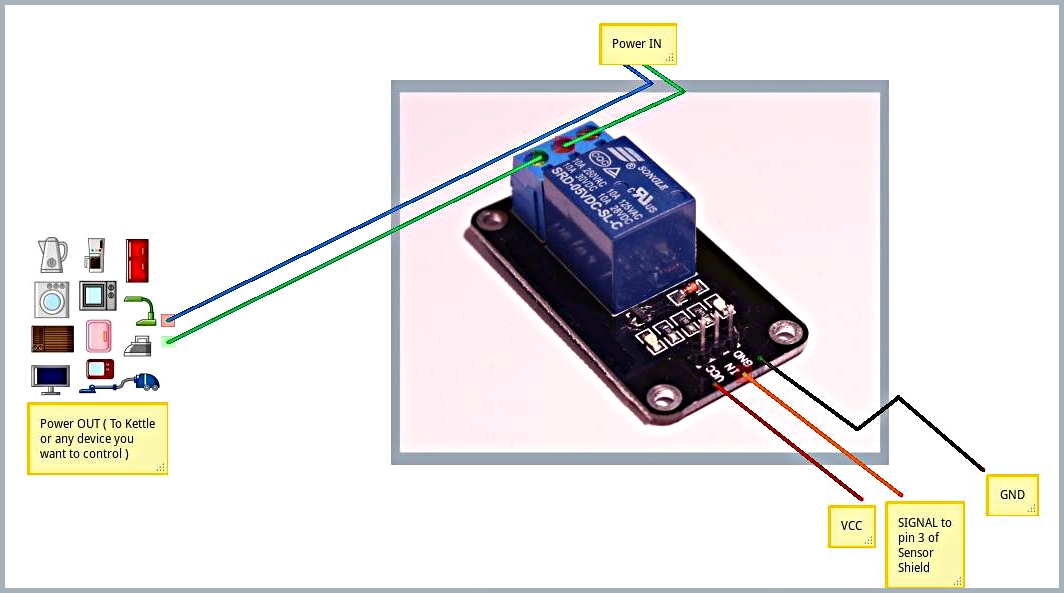
Arduino is best used for projects that require control of physical components, such as motors, lights, and sensors. Arduino boards are ideal for making basic robots, remote-controlled cars, home automation systems, and many other projects. Arduino boards can also be used to interface with other devices, such as computers and smartphones, allowing for the creation of complex projects.
When to use a raspberry pi?
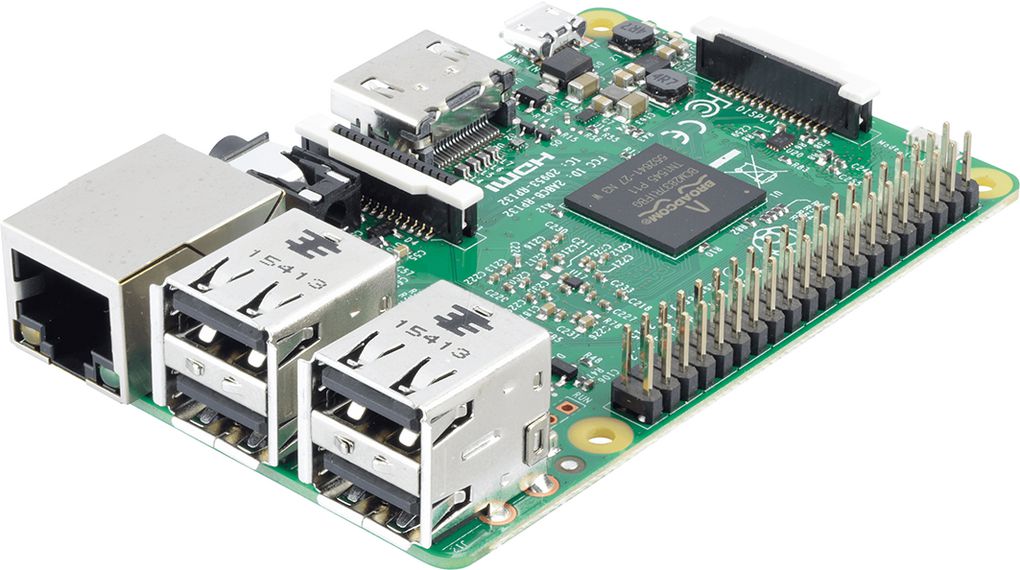
Raspberry Pi is best used for projects that require more powerful computing power, such as running programs, applications, and operating systems. Raspberry Pi is great for tasks such as creating a media center, a home automation system, or a web server. Raspberry Pi can also be used to interface with other devices, such as sensors and motors, making it a great choice for many projects.
Pros of an Arduino
- Affordable
- Easy to use
- Wide range of compatible components
- Good for prototyping
- Great for controlling physical components such as motors, lights, and sensors
Pros of a Raspberry Pi
- More powerful than Arduino
- Can run many different operating systems
- Can be used as a media center, web server, or home automation system
- Easy to connect to other devices such as computers and smartphones
- Can be used to interface with physical components such as sensors and motors Cons of Arduino
- Limited processing power
- Limited memory
- Not suitable for large or complex programs
Cons of Raspberry Pi
- More expensive than Arduino
- Can be difficult to set up
- Can be difficult to troubleshoot Skills needed for developing on an Arduino
- Basic understanding of electronics
- Knowledge of programming languages such as C++ and Python
- Understanding of microcontrollers and their components
- Understanding of logic and electronics circuits
- Ability to troubleshoot hardware and software problems
Skills needed for developing on a Raspberry Pi
- Understanding of Linux operating systems
- Knowledge of programming languages such as Python and C++
- Understanding of Raspberry Pi hardware and components
- Understanding of networking and connectivity
- Ability to troubleshoot hardware and software problems
Projects built using Arduino:
- Robotics
- Smart home automation
- LED lighting systems
- Wearables
- Drones
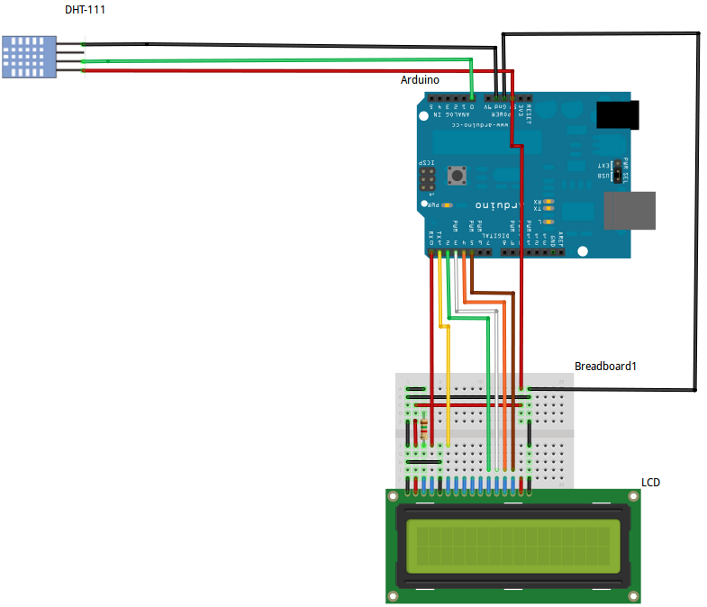
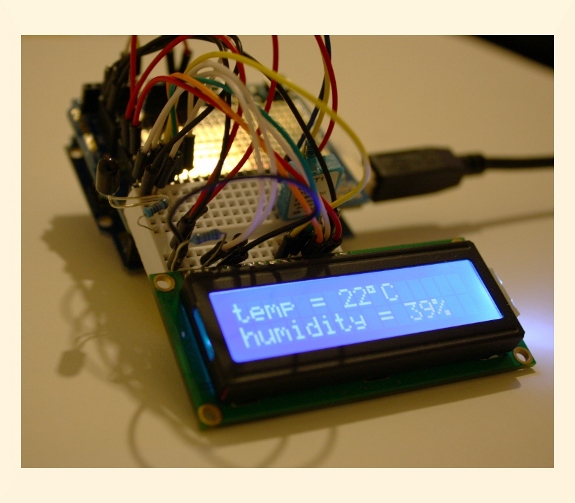
- Sensors and monitoring systems
Projects built using Raspberry Pi:
- Home automation systems
- Media centers
- Web servers
- Robotics
- Artificial intelligence (AI)
- Internet of things (IoT) solutions
- Networking projects